一种喷气式行进的仿真鱼的制作方法
1.本实用新型涉及仿真鱼技术领域,尤其涉及一种喷气式行进的仿真鱼。
背景技术:
2.许多人喜欢鱼,尤其是一些比较名贵的鱼,放在大鱼缸里,能给人带来不少的乐趣。但是,养鱼并不是一件轻松的事,尤其是热带鱼等更是难养。
3.鉴于此,克服该现有技术所存在的缺陷是本技术领域亟待解决的问题。
技术实现要素:
4.本实用新型解决的技术问题是:
5.许多人喜欢鱼,尤其是一些比较名贵的鱼,放在大鱼缸里,能给人带来不少的乐趣。但是,养鱼并不是一件轻松的事,尤其是热带鱼等更是难养。
6.本实用新型提供一种喷气式行进的仿真鱼,包括鱼身1、压泵系统2和电机301系统3;
7.所述压泵系统2包括:旋转盘201、第一轴突202、连杆203、活塞杆204、第二轴突205、进气室206、进气阀门207、出气室208、出气阀门209、吸气管210、吸气阀门211、方向喷气管212、储气囊213和尾喷气管214,所述旋转盘201与第一轴突202连接,所述连杆203的一端与所述第一轴突202耦合,所述连杆203的另一端与所述活塞杆204一端设置的第二轴突205耦合;所述活塞杆204的另一端与所述进气室206和出气室208耦合,所述出气室208通过出气阀门209与所述方向喷气管212和尾喷气管214连接,所述进气室206通过进气阀门207与所述储气囊213连接,所述储气囊213通过吸气阀门211与所述吸气管210的一端连接,所述吸气管210的另一端与空气连通;
8.所述电机系统3包括电机301和电源302,所述电机301与电源302电连接,所述电机301与所述旋转盘201连接,所述电机301驱动旋转盘201转动从而带动活塞杆204运动,所述活塞杆204的前后运动用于分别带动所述吸气阀门211和出气阀门209组合依次处于导通-关闭和关闭-导通状态,从而使得储气囊213的气体经由进气室206从尾喷气管214和方向喷气管212导出,驱动完成鱼身1运动。
9.优选的,所述储气囊213位于所述鱼身1内部的腹部位置,起到鱼鳔的作用。
10.优选的,所述电源302位于所述储气囊213的下后方位置,起到配重作用,使所述仿真鱼在水中时腹部朝下稳定放置。
11.优选的,所述进气室206和所述出气室208相互连通。
12.优选的,所述方向喷气管212包括第一方向喷气管2121和第二方向喷气管2124;
13.所述第一方向喷气管2121的一端通过出气阀门209与所述出气室208连接,所述第一方向喷气管2121的另一端为第一方向喷气口2123,所述第一方向喷气口2123位于所述鱼身1的第一鱼鳍2122位置;
14.所述第二方向喷气管2124的一端通过出气阀门209与所述出气室208连接,所述第
二方向喷气管2124的另一端为第二方向喷气口2126,所述第二方向喷气口2126位于所述鱼身1的第二鱼鳍2125位置;
15.其中,所述第一方向喷气管2121和第二方向喷气管2124配合使鱼身1在水中保持平衡。
16.优选的,所述出气室208通过出气阀门209与尾喷气管214连接,具体包括:
17.所述尾喷气管214的一端通过所述出气阀门209与出气室208连接,所述尾喷气管214的另一端为尾喷气口2141,所述尾喷气口2141位于所述鱼身1的鱼尾位置,用于将出气室208喷出的气体推动鱼身1运动。
18.优选的,所述压泵系统2还包括转接管215,所述转接管215用于连接所述方向喷气管212和所述尾喷气管214。
19.优选的,所述鱼身1为塑料材质。
20.优选的,所述电机301位于所述鱼身1内部的头部位置。
21.优选的,所述吸气管210位于所述鱼身1的中后方位置处。
22.本实用新型的有益效果是:提供一种喷气式行进的仿真鱼,模仿了鱼类在水中的游动状态,本发明设计简单、合理、实用,能够模仿鱼的动作,放在鱼缸里达到以假乱真的效果,增加观赏性。
附图说明
23.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
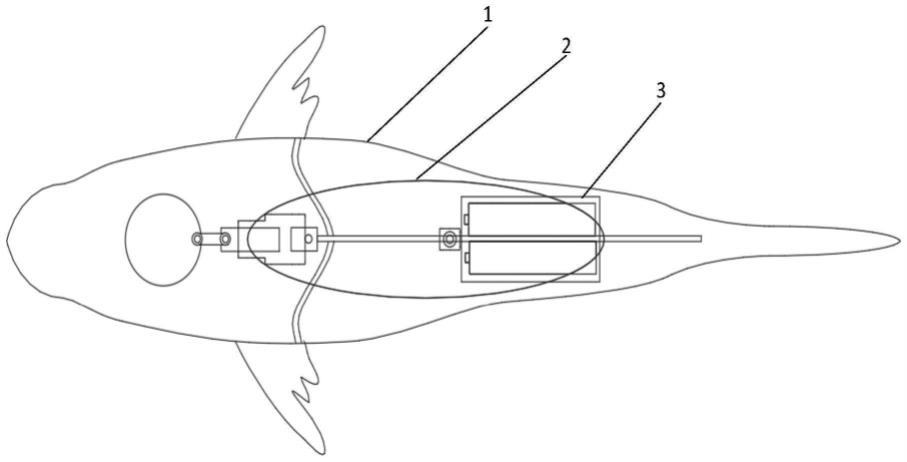
24.图1为本实用新型实施例提供的一种喷气式行进的仿真鱼的结构示意图;
25.图2为本实用新型实施例提供的一种喷气式行进的仿真鱼的结构示意图;
26.图3为本实用新型实施例提供的一种喷气式行进的仿真鱼的结构示意图;
27.图4为本实用新型实施例提供的一种喷气式行进的仿真鱼在某一状态的结构示意图;
28.图5为本实用新型实施例提供的一种喷气式行进的仿真鱼在某一状态的结构示意图;
29.图6为本实用新型实施例提供的一种喷气式行进的仿真鱼在某一状态的结构示意图;
30.图7为本实用新型实施例提供的一种喷气式行进的仿真鱼在某一状态的结构示意图;
31.图8为本实用新型实施例提供的一种喷气式行进的仿真鱼中的进气阀门和出气阀门的结构示意图;
32.图9为本实用新型实施例提供的一种喷气式行进的仿真鱼中的吸气阀门的结构示意图。
具体实施方式
33.在本实用新型的描述中,术语“内”、“外”、“纵向”、“横向”、“上”、“下”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型而不是要求本实用新型必须以特定的方位构造和操作,因此不应当理解为对本实用新型的限制。
34.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
35.本实用新型实施例提供一种喷气式行进的仿真鱼,如图1所示,包括鱼身1、压泵系统2和电机系统3;
36.如图2所示,所述压泵系统2包括:旋转盘201、第一轴突202、连杆203、活塞杆204、第二轴突205、进气室206、进气阀门207、出气室208、出气阀门209、吸气管210、吸气阀门211、方向喷气管212、储气囊213和尾喷气管214,所述旋转盘201与第一轴突202连接,所述连杆203的一端与所述第一轴突202耦合,所述连杆203的另一端与所述活塞杆204一端设置的第二轴突205耦合;所述活塞杆204的另一端与所述进气室206和出气室208耦合,所述出气室208通过出气阀门209与所述方向喷气管212和尾喷气管214连接,所述进气室206通过进气阀门207与所述储气囊213连接,所述储气囊213通过吸气阀门211与所述吸气管210的一端连接,所述吸气管210的另一端与空气连通;
37.如图2所示,所述电机系统3包括电机301和电源302,所述电机301与电源302电连接,所述电机301与所述旋转盘201连接,所述电机301驱动旋转盘201转动从而带动活塞杆204运动,所述活塞杆204的前后运动用于分别带动所述吸气阀门211和出气阀门209组合依次处于导通-关闭和关闭-导通状态,从而使得储气囊213的气体经由进气室206从尾喷气管214和方向喷气管212导出,驱动完成鱼身1运动。
38.其中,如图3所示,所述连杆203的一端与所述第一轴突202耦合,所述连杆203的另一端与所述活塞杆204一端设置的第二轴突205耦合,具体为:所述第一轴突202具体可以为圆柱状,连杆203的左端设置有与第一轴突202配合的圆形通孔,其中,第一轴突202与连杆203的左端设置的圆形通孔间隙配合,以使所述第一轴突202可以在连杆203的左端设置的圆形通孔中转动;所述第二轴突205具体也可以为圆柱状,连杆203的右端设置有与第二轴突205配合的圆形通孔,其中,第二轴突205与连杆203的右端设置的圆形通孔间隙配合,以使所述第二轴突205可以在连杆203的右端设置的圆形通孔中转动。
39.接下来解释说明实际场景下喷气式行进仿真鱼的实现原理,具体为,电机301得到电源302的供电后,电机301转动并带动所述旋转盘201转动,旋转盘201转动使连杆203绕着旋转盘201转动,从而使活塞杆204在连杆203的带动下做活塞运动(即前后运动)。
40.状态一:如图4所示,连杆203与活塞杆204处于一个水平线上,且第一轴突202远离鱼头方向。
41.状态二:如图5所示,在状态一的基础上,电机301驱动旋转盘201逆时针转动从而带动连杆203运动,以便连杆203带动活塞杆204向前运动(即向鱼头方向运动时),此时所述进气阀门207处于导通状态,出气阀门209处于关闭状态,从而使储气囊213中的气体被吸入
进气室206中。
42.状态三:如图6所示,在状态二的基础上,电机301驱动旋转盘201继续作逆时针转动从而带动连杆203运动,连杆203带动活塞杆204向前运动,此时所述进气阀门207处于导通状态,出气阀门209处于关闭状态,从而使储气囊213中的气体被吸入进气室206中,直至连杆203与活塞杆204处于一个水平线上,且第一轴突202靠近鱼头方向时,活塞杆204无法继续向前运动。
43.状态四:如图7所示,在状态三的基础上,电机301驱动旋转盘201继续作逆时针转动从而带动连杆203运动,连杆203带动活塞杆204向后运动(即向鱼尾方向运动时),此时活塞杆204压缩由进气室206进入的空气,同时使所述进气阀门207处于关闭状态,出气阀门209处于导通状态;由出气阀门209喷出的压缩气体从方向喷气管212和尾喷气管214喷出,从而带动鱼身1运动。
44.如图2所示,所述储气囊213通过吸气阀门211与所述吸气管210的一端连接,所述吸气管210的另一端与空气连通;当所述储气囊213中的压力小于空气中的压力时,储气囊213自动从空气中吸入气体并存储在储气囊213中。
45.本实施例提供了一种可实现的进气阀门207、出气阀门209和吸气阀门211的结构和实现原理,图8-9所示的黑色圆点为弹珠,具体为:
46.进气阀门207的结构和实现原理:如图2和图8所示,所述进气阀门207中含有弹珠,且所述进气阀门207的一端为大口径端,另一端为小口径端,大口径端与进气室206直接连通,小口径端通过通气管与储气囊213连通,其中,大口径端的开口处设置有开设细孔的挡板,该开设有细孔的挡板可以防止活塞杆204向前运动时(即向鱼头方向运动时)弹珠将进气室206的进气口堵住,从而保证储气囊213中的气体被成功吸入进气室206中;活塞杆204向后运动时(即向鱼尾方向运动时),弹珠将进气阀门207的小口径端堵住,从而使进气阀门207处于关闭状态。
47.出气阀门209的结构和实现原理:如图2和图8所示,所述出气阀门209中含有弹珠,且所述出气阀门209的一端为大口径端,另一端为小口径端,大口径端与方向喷气管212和/或尾喷气管214连接,小口径端与出气室208直接连通,其中,大口径端设置有开设细孔的挡板,该开设有细孔的挡板可以防止活塞杆204向后运动时(即向鱼尾方向运动时)弹珠将方向喷气管212和/或尾喷气管214堵住,从而保证压缩空气可以顺利通过方向喷气管212和/或尾喷气管214,并驱动鱼身1运动;活塞杆204向前运动时(即向鱼头方向运动时),弹珠将出气室208堵住,从而使出气室208处于关闭状态。
48.吸气阀门211的结构和实现原理:如图9所示,所述吸气阀门211中含有弹珠,且吸气阀门211的一端为大口径端,另一端为小口径端,大口径端与储气囊213直接连接,小口径端与吸气管210连接,其中,大口径端设置有开设细孔的挡板,该开设有细孔的挡板可以防止储气囊213中的压力小于空气压力时弹珠掉入储气囊213中并堵住储气囊213。当储气囊213中的压力小于空气中的压力时,弹珠掉落至开设有细孔的挡板的上表面,从而使吸气管210和储气囊213处于导通状态,储气囊213从空气中吸入气体;当出气囊中的压力大于或者等于空气中的压力时,弹珠堵住吸气阀门211的小口径处,从而使吸气管210和储气囊213处于关闭状态。
49.以上仅仅是进气阀门207、出气阀门209和吸气阀门211的一种实现方式,具体实际
应用场景中可以根据需要进行设计,本实施例并不用于限定本实用新型。
50.如图2所示,为了仿真鱼可以漂浮在水面,所述储气囊213位于所述鱼身1内部的腹部位置,起到鱼鳔的作用。
51.如图2所示,为了使仿真鱼放在水中时腹部朝下稳定放置,所述电源302位于所述储气囊213的下后方位置,起到配重作用,使所述仿真鱼在水中时腹部朝下稳定放置。其中,所述电源302可以为电池,电池放置在电池盒中,然后将放置有电池的电池盒设置在储气囊213下后方位置。
52.所述进气室206和所述出气室208相互连通。
53.如图2-3所示,为了使仿真鱼在水中运动时保持平衡状态,所述方向喷气管212包括第一方向喷气管2121和第二方向喷气管2124;所述第一方向喷气管2121的一端通过出气阀门209与所述出气室208连接,所述第一方向喷气管2121的另一端为第一方向喷气口2123,所述第一方向喷气口2123位于所述鱼身1的第一鱼鳍2122位置;所述第二方向喷气管2124的一端通过出气阀门209与所述出气室208连接,所述第二方向喷气管2124的另一端为第二方向喷气口2126,所述第二方向喷气口2126位于所述鱼身1的第二鱼鳍2125位置;其中,所述第一方向喷气管2121和第二方向喷气管2124配合使鱼身1在水中保持平衡。
54.如图2-3所示,所述出气室208通过出气阀门209与尾喷气管214连接,具体包括:所述尾喷气管214的一端通过所述出气阀门209与出气室208连接,所述尾喷气管214的另一端为尾喷气口2141,所述尾喷气口2141位于所述鱼身1的鱼尾位置,用于将出气室208喷出的气体推动鱼身1运动。
55.如图2所示,所述压泵系统2还包括转接管215,所述转接管215用于连接所述方向喷气管212和所述尾喷气管214。
56.具体可以为,转接管215有四个开口,第一开口处与出气阀门209连接;第二开口处与第三开口处分别与第一方向喷气管2121和第二方向喷气管2124,第四开口处与尾喷气管214连接。
57.为了使鱼身1做到轻量化,所述鱼身1为塑料材质,所述塑料材质可以为pp、pc或者abs等。
58.所述电机301位于所述鱼身1内部的头部位置。
59.所述吸气管210位于所述鱼身1的中后方位置处。
60.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 一种人体工学游戏柜的制作方法
- 一种羽毛球的发球装置的制作方...
- 一种提高儿童辨识能力的益智游...
- 健身器材及其内磁控装置的制作...
- 一种具有缓冲装置的体育器材
- 一种手柄用3D摇杆的制作方法
- 一种玩具车的车轮安装装置的制...
- 用以对乘坐交通工具上的个人电...
- 一种四肢骨折术后康复锻炼装置...
- 一种新型康复科用手指力量恢复...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1